mirror of https://github.com/koide3/small_gicp.git
6.2 KiB
6.2 KiB
Benchmark
Dataset
The following benchmark requires the KITTI odometry evaluation dataset. You can download the full dataset (80GB) from the official dataset page or a part of the dataset (500 frames in 00 sequence, 622MB) from google drive (KITTI00.tar.gz).
Note that because the original KITTI dataset is distributed under the CC BY-NC-SA 3.0 license, the derived dataset (KITTI00.tar.gz) must not be used for commercial purposes.
Build
cd small_gicp
mkdir build && cd build
cmake .. -DBUILD_WITH_TBB=ON -DBUILD_WITH_PCL=ON -DBUILD_BENCHMARKS=ON
# [optional] Build with Iridescence (visualization)
git clone https://github.com/koide3/iridescence --recursive
mkdir iridescence/build && cd iridescence/build
cmake .. && make -j
sudo make install
cmake .. -DBUILD_WITH_IRIDESCENCE=ON
# [optional] Build with fast_gicp
export FAST_GICP_INCLUDE_DIR=/your/fast_gicp/include
cmake .. -DBUILD_WITH_FAST_GICP=ON
# Build
make -j
# Test
# Show options
./odometry_benchmark
# USAGE: odometry_benchmark <dataset_path> <output_path> [options]
# OPTIONS:
# --visualize
# --num_threads <value> (default: 4)
# --num_neighbors <value> (default: 20)
# --downsampling_resolution <value> (default: 0.25)
# --voxel_resolution <value> (default: 2.0)
# --engine <pcl|small_gicp|small_gicp_omp|small_vgicp_omp|small_gicp_tbb|small_vgicp_tbb|small_vgicp_model_tbb|small_gicp_tbb_flow> (default: small_gicp)
# Run odometry benchmark
./odometry_benchmark /your/kitti/dataset/velodyne /tmp/traj_lidar.txt --visualize --num_threads 16 --engine small_gicp_tbb
Results
All benchmarks were conducted on the KITTI 00 sequence.
Downsampling
cd small_gicp/scripts
./run_downsampling_benchmark.sh /path/to/kitti/velodyne
python3 plot_downsampling.py
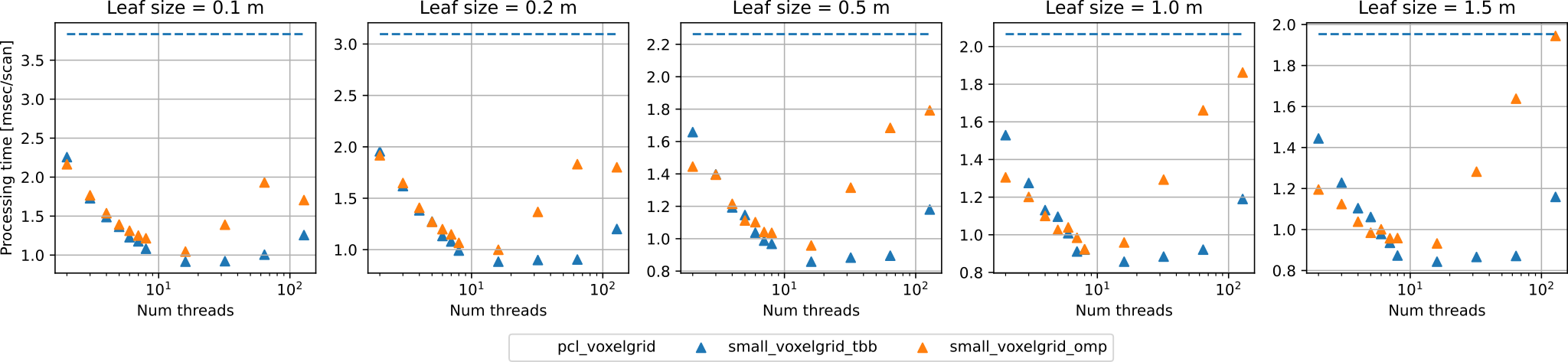
- Single-threaded
small_gicp::voxelgrid_samplingis about 1.3x faster thanpcl::VoxelGrid. - Multi-threaded
small_gicp::voxelgrid_sampling_tbb(6 threads) is about 3.2x faster thanpcl::VoxelGrid. small_gicp::voxelgrid_samplinggives accurate downsampling results (almost identical to those ofpcl::VoxelGrid) whilepcl::ApproximateVoxelGridyields spurious points (up to 2x points).small_gicp::voxelgrid_samplingcan process a larger point cloud with a fine voxel resolution compared topcl::VoxelGrid(for a point cloud of 1000m width, minimum voxel resolution can be 0.5 mm).

- While TBB shows slightly better scalability, both the parallelism backends do not obtain a speed gain for the cases with threads more than 16.
KdTree construction
cd small_gicp/scripts
./run_kdtree_benchmark.sh /path/to/kitti/velodyne
python3 plot_kdtree.py
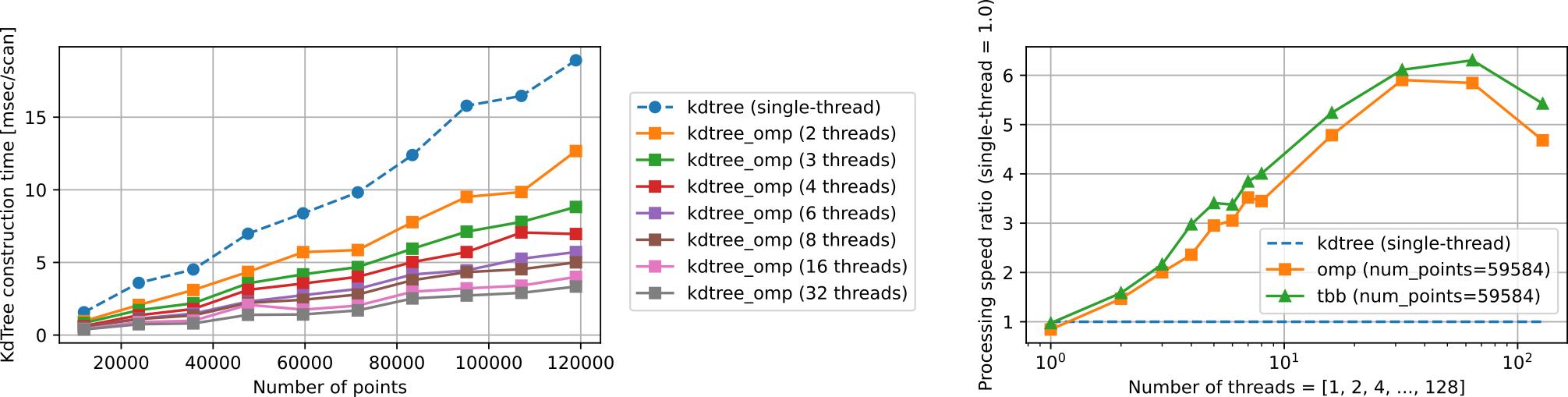
- Multi-threaded implementation (TBB and OMP) can be up to 4x faster than the single-threaded one (All the implementations are based on nanoflann).
The processing speed gets faster as the number of threads increases, but the speed gain is not monotonic sometimes (because of the scheduling algorithm or some CPU(AMD 5995WX)-specific issues?).- The new KdTree implementation shows a good scalability thanks to its well balanced task assignment.
- This benchmark only compares the construction time (query time is not included).
Odometry estimation
cd small_gicp/scripts
./run_odometry_benchmark.sh /path/to/kitti/velodyne
python3 plot_odometry.py
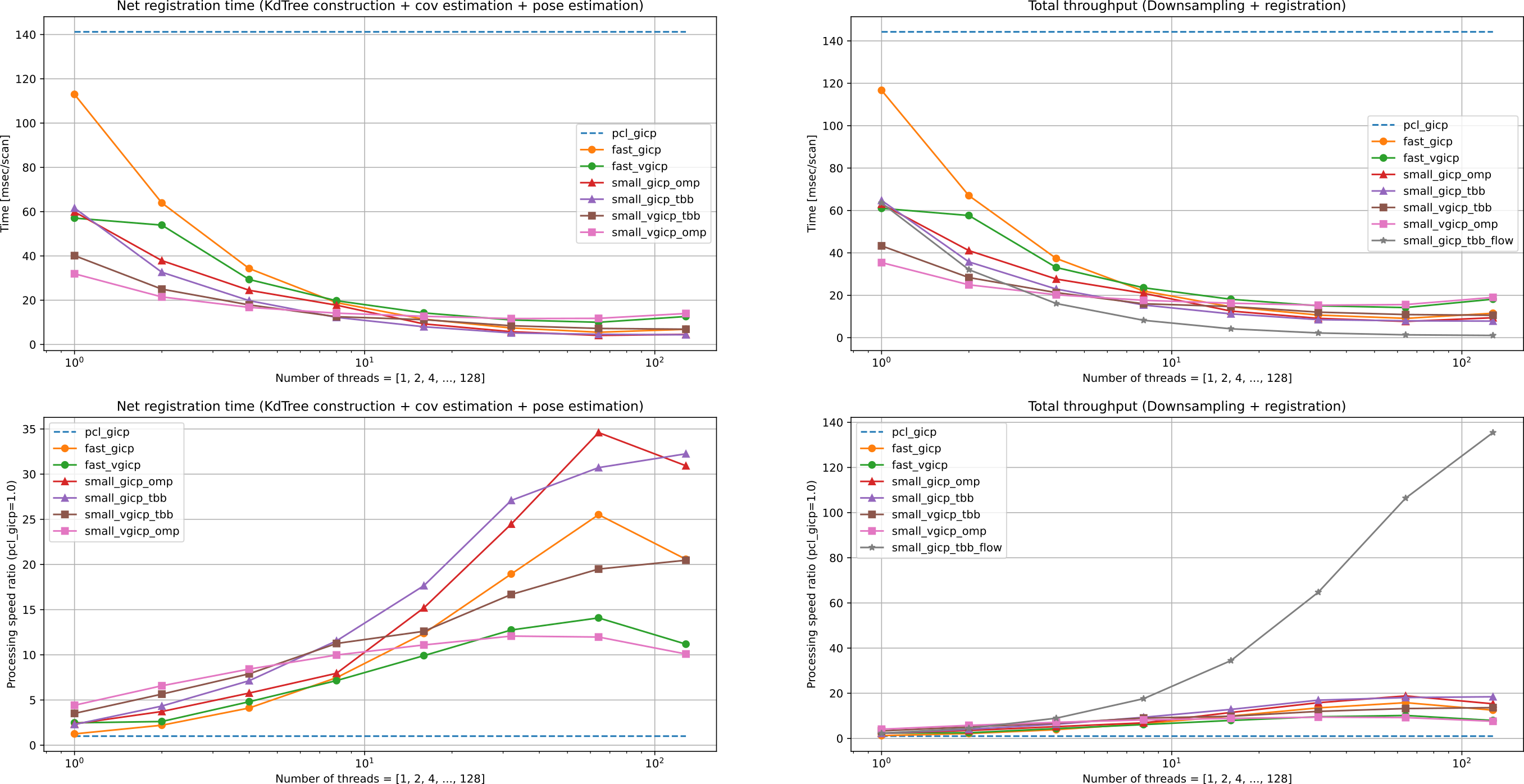
- Single-thread
small_gicp::GICPis about 2.4x and 1.9x faster thanpcl::GICPandfast_gicp::GICP, respectively. small_gicp::(GICP|VGICP)shows a better multi-thread scalability compared tofast_gicp::(GICP|VGICP).small_gicp::GICPparallelized with TBB flow graph shows an excellent scalability to many-threads situations (~128 threads) but with latency degradation.
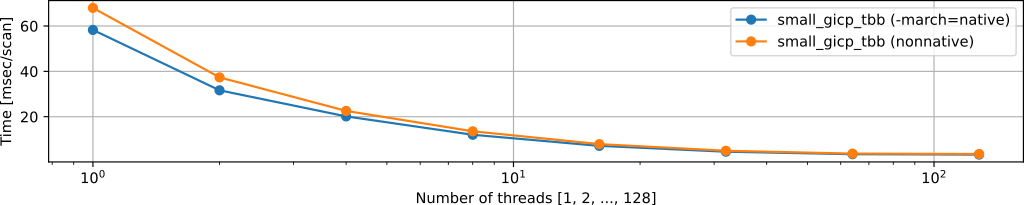
SIMD intrinsics (-march=native) (We recommend keeping this feature disabled unless you are 100% sure what it is)
BUILD_WITH_MARCH_NATIVE=ONenables platform-specific intrinsics and squeezing the performance (1.1x speedup for free).- However, you must ensure that all involved libraries are built with
-march=native, otherwise the program will crash. - Generally, it is difficult to properly set
-march=nativefor all libraries, and we recommend keepingBUILD_WITH_MARCH_NATIVE=OFF.
Results:
BUILD_WITH_MARCH_NATIVE=OFF:Eigen::SimdInstructionSetsInUse()=SSE, SSE2BUILD_WITH_MARCH_NATIVE=ON:Eigen::SimdInstructionSetsInUse()=AVX, SSE, SSE2, SSE3, SSSE3, SSE4.1, SSE4.2
Accuracy
small_gicp::GICPoutputs mostly identical results to those offast_gicp::GICP.- The results of
small_gicp::VGICPslightly differ fromfast_gicp::VGICP. Although the difference is marginal, it needs to be investigated.
pcl_gicp : APE=6.451 +- 3.421 RPE(100)=2.424 +- 1.707 RPE(400)=8.416 +- 4.284 RPE(800)=12.652 +- 6.799
fast_gicp : APE=6.118 +- 3.078 RPE(100)=1.212 +- 0.717 RPE(400)=6.058 +- 3.128 RPE(800)=10.356 +- 6.335
fast_vgicp : APE=6.791 +- 3.215 RPE(100)=1.253 +- 0.734 RPE(400)=6.315 +- 3.011 RPE(800)=10.367 +- 6.147
small_gicp : APE=6.096 +- 3.056 RPE(100)=1.211 +- 0.717 RPE(400)=6.057 +- 3.123 RPE(800)=10.364 +- 6.336
small_gicp (tbb) : APE=6.096 +- 3.056 RPE(100)=1.211 +- 0.717 RPE(400)=6.057 +- 3.123 RPE(800)=10.364 +- 6.336
small_gicp (omp) : APE=6.096 +- 3.056 RPE(100)=1.211 +- 0.717 RPE(400)=6.057 +- 3.123 RPE(800)=10.364 +- 6.336
small_vgicp : APE=5.956 +- 2.725 RPE(100)=1.315 +- 0.762 RPE(400)=6.849 +- 3.401 RPE(800)=10.396 +- 6.972
Comparison with Open3D
Processing speed comparison between small_gicp and Open3D (youtube).